Infos zu dieser Page
Kontakt
Datenschutzerklärung
Impressum
|
|
X5N mit Trijekt
, Ausgangsbasis
, Ansaugkrümmer
, Drehzahlaufnehmer
, Kabelbaum
, Catchtank
Seite 6, Start
Motorstart
Oktober 2018 ist es so weit, alle Sensoren, Kabelbäume und neu angefertigten Teile sind so weit, dass der Handstart der Einspritzung vorgenommen werden kann. Natürlich nicht reibungsfrei, diverse unterschiedliche Angaben über die Amplitude des Drehzahlaufnehmers in diversen Software und Handbuch Versionen und trotz erfolgreichen Drehzahltest und Bestätigung des technischen Vertriebes über die korrekte Signalqualität gab es Drehzahlfehler... Nacharbeiten, etwas konnte die untergelegte Distanzplatte für den induktiven Aufnehmer noch korrigiert werden und damit reichte das Signal für einen einwandfreien Start.
Dann ging es weiter, Lima geht nicht, Fehler suchen (Anschluss Erregerwicklung! In allen Schaltplänen falsch eingezeichnet). Zum Glück ist mein Sicherungskasten noch komplett offen im Fußraum, es kann noch alles angepasst werden.
Fehler 944'er Drosselklappe: der Unterdruckanschluss sitzt für den Benzindruckregler falsch, soll mal einer draufkommen, ich habe mit einem Unterdruckmesser (weil ich so was im Micra im Armaturenbrett fest installiert habe und das für Analysezwecke immer gut ist) bemerkt, das der Unterdruck im Leerlauf 0 ist. Sollte aber ein negativer Wert sein. So stimmt im Leerlauf die Einspritzmenge nicht... danach konnte wieder etwas weniger Leerlauf eingestellt werden.
Dann verwendete ich die neueste Win Trijekt und damit waren wieder alle Einstellwerte weg, falsche Düseneinschaltzeiten, die ich vor 2 Jahren programmiert habe, Leerlaufsteller immer auf 100% usw. Der Vorteil, alles anpassen zu können bringt den Nachteil, dass man ewig programmiert und alles falsch sein kann. Konzentration und Mühe ist angesagt. In der Industrie wird das Debugging genannt. Bei der A 400M ging der erste Prototyp mit 400 Fehlern in den Flugversuch... Da bin ich ja noch vieel besser...
Ende 2018, Frühjahr 2019 dann die vielen Starts und Abstimmungen im Leerlauf und das Kennenlernen der zum Teil schlecht dokumentierten Einstellfelder. Meine Erfahrung, nicht bei Trijekt anfragen, etwas im Forum stöbern, eine Nacht darüber schlafen und selber testen... Eintragen der Fehlererkennung der Sensoren, auch nach dem Youtube Tutorial, man kann ja sagen, was man will, aber Fehlbedienung ist das keine, wenn meine Trijekt anders reagiert, als in dem Tutorial. Wenn ich die Werte "von Trijekt laden" kommen keine Schwellwerte in den Fenstern und zum Teil stürzt das Programm dann komplett ab. Das nächste Projekt dann mit einer anderen Steuerung, die Recherchen laufen schon. Inzwischen gibt es auch in England dank der aktiven Amateurrennszene einige Anbieter, zum Teil schon appliziert mit gängigen Motortypen.
Nachdem einige Abstimmungen gemacht waren und die Werte immer feiner gegen Lambda 1 programmiert werden, machte ich mich an den Leerlaufbereich, der konnte nicht stabil eingestellt werden, da die Einspritzdüsen viel zu groß für meinen Motor und meine Anwendung (halbsequentiell) sind. Im Leerlauf sind die so kurz getaktet, dass die Ansteuerzeiten um Faktor 3 geringer sind, als die Schaltzeiten... Ein weiterer Nachteil der Trijekt gegenüber Rennsteuergeräten wie Emerald, EFI oder AME: die Abhängigkeit der Düsenschaltzeiten von der Versorgungsspannung sind logarithmisch, bei der Trijekt kann ich nur 2 Werte eingeben, also linear...
2019, also Schaltnetzteil reparieren und die Düsenschaltzeiten messen... hierzu habe ich gleich eine optimierte Universalvorrichtung konstruiert und sämtliche herumliegenden Einspritzdüsen gereinigt, gangbar gemacht und vermessen. Dabei hat sich wieder herausgestellt, dass die "minderwertigen" Nissan Micra Düsen aus den 90'ern mit Abstand die beste Schaltzeit haben... Und die einzigen Düsen sind, die nach 10 Jahren Standzeit nicht verklebt sind. Das Mieseste, was es gibt ist wieder VW OEM Ware. Halt wie Chinaprodukte, es geht halt noch irgendwie.
Durchflussmenge: die Murena Düsen, die mir empfohlen wurden haben 300 g/min Benzindurchsatz (reicht für 290 PS Saugmotor), mehr als das Doppelte, was ich wirklich brauche.
Zurück zu den EV6 vom Tuner: Schaltzeit: 10 V: 1,034 ms, 14 V: 0,511 ms. Kein Wunder, im Leerlauf betrug die Ventiltaktung 0,25 ms, die Hälfte der Schaltzeit, so was kann nicht rund laufen. Darum auch der Umbau auf vollsequentiell, damit wird nur jede 2. Umdrehung eingespritzt und die Schaltzeiten werden doppelt so lange. Da wurde ich vom Spezialisten wieder schlecht beraten... also Umbau der Einspritzleiste, denn die EV14 Düse ist auch noch eine sehr kurze Version. Hier verwende ich eine, die auf 160 PS optimiert ist, also ca. 170 g/min.
2020, wird also das Saugrohr komplett umgebaut und die Drosselklappe angepasst, hierzu müssen auch einige Universalwerkzeuge zur Bearbeitung von Rundmaterial konstruiert und gebaut werden. Dank universeller und μm genauer Deckel Fräse alles nur eine Frage der Geduld, die Jahre Maschinenreparatur haben sich absolut gelohnt.

Hier der 24-4 Drehzahlgeber an der Nockenwelle:

Die neue Drehzahlerkennung wird auf dem Motorenteststand nachgemessen:
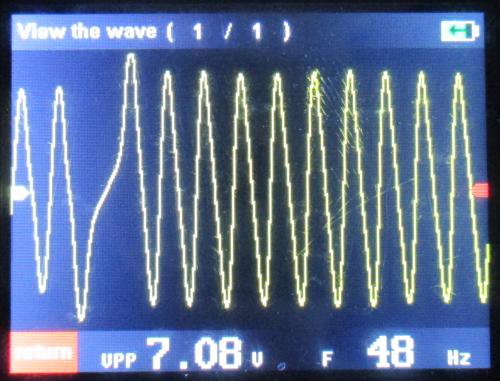
Also wenn das nun nicht funktioniert, die Amplitude war bei 350 1/min! Bei Höchstdrehzahl gibt so ein induktiver Sensor aber schon mal 200V Amplitude raus!.
Noch den Zündoffset einstellen, das geht auch mit fliegendem Kabelbaum und dann wird der schon aufgeschnittenen Kabelbaum umgebaut.
, Ausgangsbasis
, Ansaugkrümmer
, Drehzahlaufnehmer
, Kabelbaum
, Catchtank
Seite 6, Start
|


